
引言
首先,将需要计算的空间(物理空间)划分为大量几何单元,称为网格单元(grid cells)。这一过程称为网格生成(grid generation)(有些作者使用mesh一词,含义相同)。也可以将其视为:先在物理空间布置网格点(也称节点nodes或顶点vertexes),再用直线将它们连接起来——网格线。二维(2-D)网格通常由三角形和/或四边形组成;三维(3D)网格通常由四面体、六面体、棱柱体或金字塔单元组成。对网格生成工具最重要的要求是:网格单元之间不能有空洞,但也不能重叠。此外,网格应当平滑,即单元体积或拉伸比不应出现突变,单元应尽可能规则。进一步地,若网格由四边形或六面体组成,网格线不应出现很大的折 kink,否则数值误差会显著增加。
一方面,网格可以生成得紧贴物理空间边界,此时称为贴体网格(body-fitted grid)(图3.1a)。这种方法的主要优点是:在边界附近(例如固体表面上的剪切层)可以非常精确地分辨流动;其代价是网格生成工具的复杂度很高,尤其是在“真实工程”几何的情况下。另一方面,所谓笛卡尔网格(Cartesian grids)$[1-8]$ 的单元边与笛卡尔坐标轴平行,生成非常容易。它们的优点是:式(2.19)中的通量评估要比贴体网格简单得多。但从图3.1b或c可见,对边界的通用且精确的处理很难实现$[3]$。因此,贴体网格或组合方法(见11.2.4节)通常更受青睐,尤其是在工业环境中,因为被模拟构型的几何复杂度往往很高。
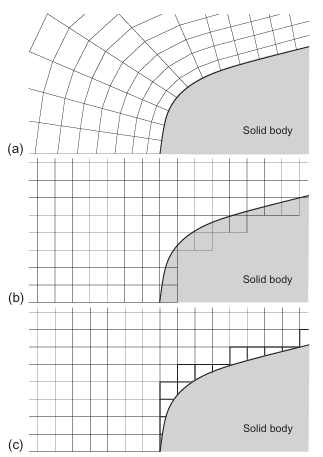 图3.1 二维贴体网格(a)、浸没边界笛卡尔网格(b)、固体附近多边形边界单元笛卡尔网格(c);(c)中,边界单元格由粗线标记。
图3.1 二维贴体网格(a)、浸没边界笛卡尔网格(b)、固体附近多边形边界单元笛卡尔网格(c);(c)中,边界单元格由粗线标记。
根据我们推导控制方程(2.19)的方式,连续方程(2.3)包含密度的时间导数。由于密度作为独立变量又用于计算压力(式(2.29)),因此动量方程中密度与压力的时间演化相互耦合。基于这一原因,采用对控制方程(2.19)进行离散的求解方法称为基于密度的格式(density-based schemes)。这种表述的问题在于:对于不可压缩流体,连续方程中的密度时间导数消失,压力不再由任何独立变量驱动。另一个困难来自于:随着Mach数降低,声波与对流波速差距增大,使得控制方程变得越来越“刚性”(stiff),从而更难求解$[10]$。为应对该问题,基本发展出三种途径:第一种是求解压力Poisson方程,它可由动量方程推导$[11-17]$,称为基于压力的格式(pressure-based schemes);第二种称为人工可压缩方法(artificial compressibility method),其思想是在连续方程中用压力的时间导数替代密度的时间导数,从而直接耦合速度场与压力场$[18,19]$;第三种也是最通用的方案,是对控制方程进行预条件化(preconditioning)$[20-31]$,使得同一数值格式可用于很低Mach数以及高Mach数流动。我们将在9.5节更深入地讨论这一方法。
在以下章节中,我们将进一步了解:对控制方程在空间与时间上的数值逼近、湍流建模以及边界处理等不同求解方法的最基本原理。